Descripción general: la computadora superior, la computadora inferior y los BM están interconectados en el Sistema de Gestión de Batería de Litio (BMS), formando un marco completo de administración, monitoreo y control. A través de sus respectivas divisiones de roles y colaboración, garantizan la operación segura, confiable y eficiente del
sistema de batería.
Primero 、 Relación básica:
1. Computadora superior
La computadora superior es el dispositivo de control y administración del sistema. Es principalmente responsable de monitorear, analizar datos generales y emitir instrucciones de operación. La computadora superior se comunica bidireccionalmente con los BMS a través de protocolos de comunicación estándar (como Can Bus, Rs485, UART o Ethernet), obteniendo los datos operativos del
batería, incluyendo voltaje, corriente, temperatura, SOC (estado de carga), SOH (estado de salud) y otros parámetros clave. La computadora superior analiza y almacena estos datos, y emite instrucciones de operación en función del estado de la batería, como iniciar el equilibrio de la batería, ajustar estrategias de carga y realizar acciones de protección, etc. Además, la computadora superior también puede monitorear múltiples módulos BMS, habilitar el monitoreo remoto, el control centralizado y la gestión de mantenimiento.
2. Máquina de nivel inferior
La máquina de nivel inferior es responsable de interactuar con sensores o actuadores, recopilar datos de sensores o realizar tareas de control específicas. Transmite los datos al BMS y ejecuta tareas relacionadas con la gestión de la batería. En algunos sistemas, la máquina de nivel inferior también es responsable de tareas de ejecución específicas, como el control del dispositivo de regulación de la temperatura de las celdas de batería individuales. La plataforma de hardware de la máquina de nivel inferior generalmente incluye chasis PXI, procesadores en tiempo real y tableros de E/S, etc., y es responsable de la ejecución de la secuencia y la invocación del dispositivo.
3. 3. BMS
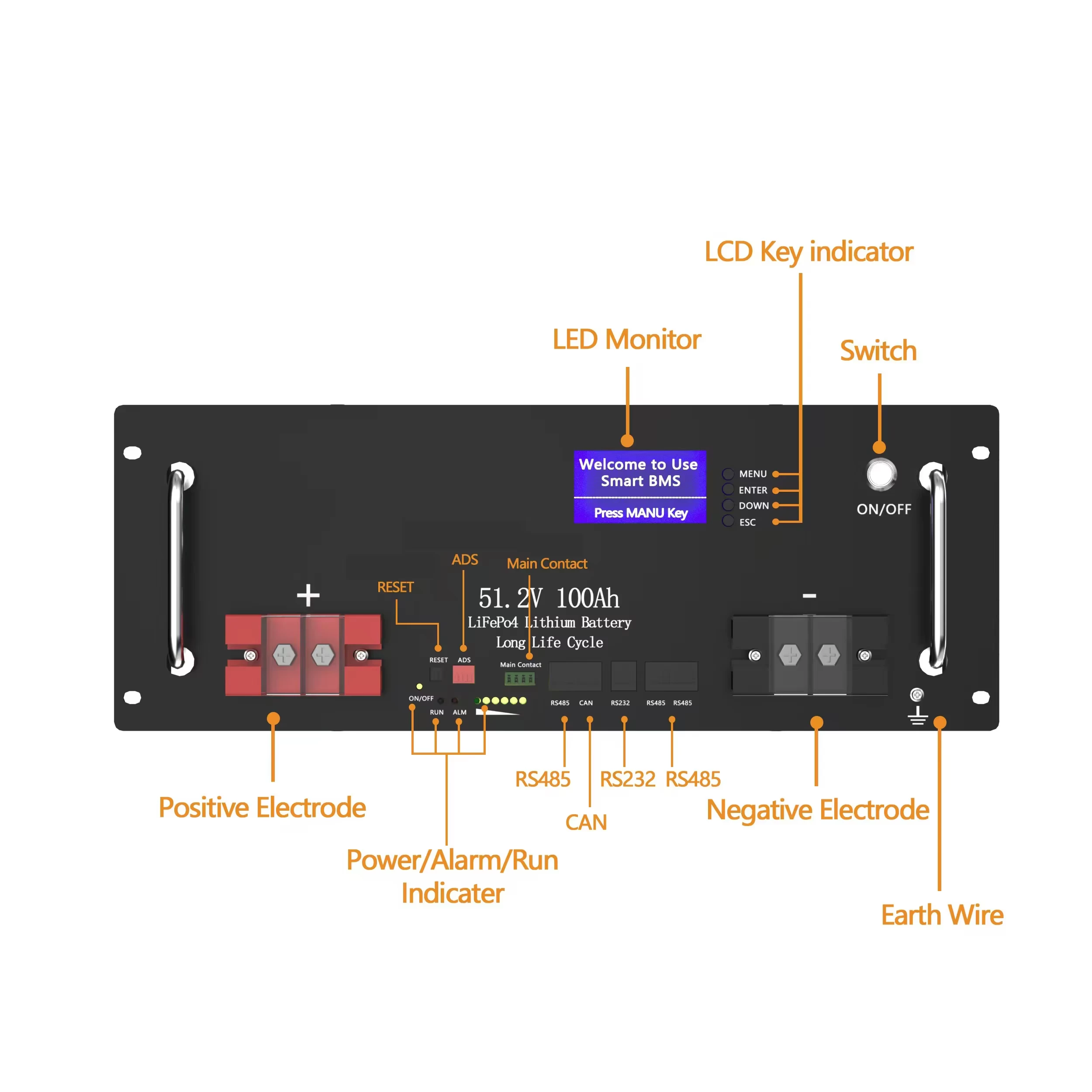
BMS es un dispositivo que administra directamente el módulo de la batería. Es responsable de monitorear, proteger y controlar la batería. BMS se comunica con la computadora superior para informar el estado de la batería y recibir instrucciones, y también se comunica con la computadora inferior para obtener datos del sensor en el nivel inferior o controlar actuadores específicos. BMS adquiere datos del sensor en el nivel inferior a través de la computadora inferior, como el voltaje, la corriente y la temperatura de cada celda de la batería, y procesa los datos clave localmente antes de enviarlo a la computadora superior. BMS también tiene varias funciones, incluida la recopilación de datos, la gestión del equilibrio, las funciones de protección y el diagnóstico de fallas, el manejo de la carga, el manejo térmico y la notificación de alarma, etc.
Segunda interacción 、 entre la computadora host, BMS y la computadora de orden inferior
1. Flujo de datos:
Desde la máquina de nivel inferior hasta el BMS: la máquina de nivel inferior recopila datos de la batería y los transmite al BMS para el procesamiento y la gestión centralizados.
Desde el BMS hasta la máquina de nivel superior: los datos procesados por el BMS se cargan a la máquina de nivel superior, que luego realiza un análisis y almacenamiento adicionales, y genera informes, predice la vida útil de la batería, etc.
2. Flujo de instrucciones:
Desde la computadora superior hasta el BMS: la computadora superior, basada en el estado operativo de la batería o las instrucciones del operador ", envía instrucciones de operación al BMS, como ajustar las estrategias de carga y descarga, realizar acciones de ecualización o protección.
Desde el BMS hasta la computadora inferior: el BMS envía instrucciones desde la computadora superior a la computadora inferior para llevar a cabo tareas operativas específicas, como iniciar o detener la protección de la batería, el BMS envía instrucciones desde la computadora superior a la computadora inferior para llevar a cabo tareas operativas específicas, como iniciar o detener el dispositivo de protección de la batería, ajustar el control de temperatura, etc.
Tres. 、 Comunicación y protocolos
1. Protocolo de comunicación entre la computadora host y BMS:
Los protocolos de comunicación comunes incluyen Bus CAN, RS485, Ethernet, UART, etc. Estos protocolos proporcionan canales de transmisión de datos confiables, asegurando que la computadora superior y los BM puedan intercambiar datos e instrucciones en tiempo real.
2. Protocolo de comunicación entre BMS y computadora de nivel inferior:
La comunicación entre la máquina de nivel inferior y el BMS puede emplear protocolos de comunicación interna como I2C o SPI, que se utilizan para el rápido intercambio de datos de sensores y comandos de control. Estos protocolos generalmente se emplean en escenarios de comunicación de corta distancia y en tiempo real.
Tercer 、 Estructura jerárquica de la arquitectura del sistema
Arquitectura jerárquica: la computadora superior, BMS y la computadora inferior forman una estructura jerárquica: la computadora superior está en el nivel superior y es responsable del monitoreo general, el procesamiento de datos y el control del sistema.
Como capa intermedia, BMS no solo realiza tareas específicas de gestión de baterías, sino que también informa datos a la computadora superior y ejecuta las instrucciones dadas por la computadora superior.
2. El dispositivo de nivel inferior está en la parte inferior e interactúa directamente con sensores y actuadores, proporcionando funciones locales de recopilación y control de datos.

































